
I never planned to build something like this. For years, my Robomow RS625 did a decent job maintaining my large lawn—not perfectly, but well enough. It worked reliably for four seasons, but in the fifth year, problems started piling up.
The front wheel’s bushing wore out, causing the axle to scrape against the control board. The robot kept failing, and within two months, I replaced three boards. The worst part? Replacement wheels were impossible to find in my region.


That’s when I realized—it was time for a new mower.
What I Looked for in a Replacement
Having used a robotic mower for nearly five years, I knew exactly what I didn’t want in my next one. Here’s what mattered most:
1. Large Mowing Area
- My lawn is big, and I needed a robot that could handle it without constant intervention.
2. No Perimeter Wire
- After years of use, the boundary wire created visible ruts along my lawn’s edges. I had to fix them multiple times per season. A wire-free solution was a must.



3. Full Remote Access
- The Robomow’s app only worked via Bluetooth—useless when I’m away for weeks. I needed true remote control from anywhere with internet.
4. Wheels That Actually Work
- My old mower constantly got stuck:
- Wet grass clogged the wheels
- Soft ground made them sink
- Fall leaves jammed the mechanism
- You’d think manufacturers would fix these issues by now, but real user reviews confirmed: they haven’t.
- Worse, some brands now sell “subscriptions” for basic navigation features—another dealbreaker.


The DIY Search Begins
Frustrated with commercial options, I turned to DIY robotic mowers. After researching, the most promising project I found was:
👉 REPAL Maker Shop’s 3D-Printed Large-Area Mower
I loved the concept, bought the full kit and 3D-printable chassis, and dove into assembly. (That process deserves its own post—maybe later!)
One catch: This bot still used a perimeter wire. At the time, I couldn’t find any wire-free DIY mowers for large areas.
The Breaking Point (Literally)
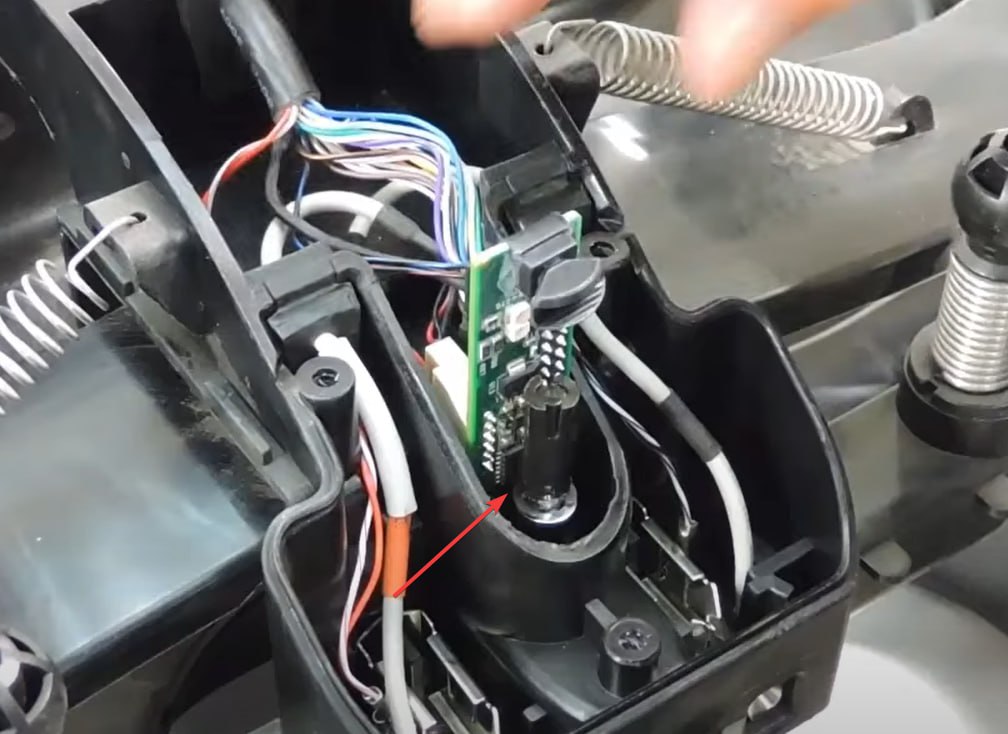
After finishing the build, I hit a major flaw: the wheel motors were way too weak.
- First test? One motor’s gearbox snapped instantly.
- Replacement motor? Same failure during docking tests.
- Research revealed: These motors weren’t designed for real-world loads.
I searched for better alternatives but found nothing that fit. That’s when I discovered ROS2 (Robot Operating System) and started learning it through this fantastic tutorial:
👉 Articulated Robotics’ ROS2 Guide
Where We Are Now
So why does my robot still use the LAM Monster chassis? Simple: I already had it printed. But inside? Completely different.
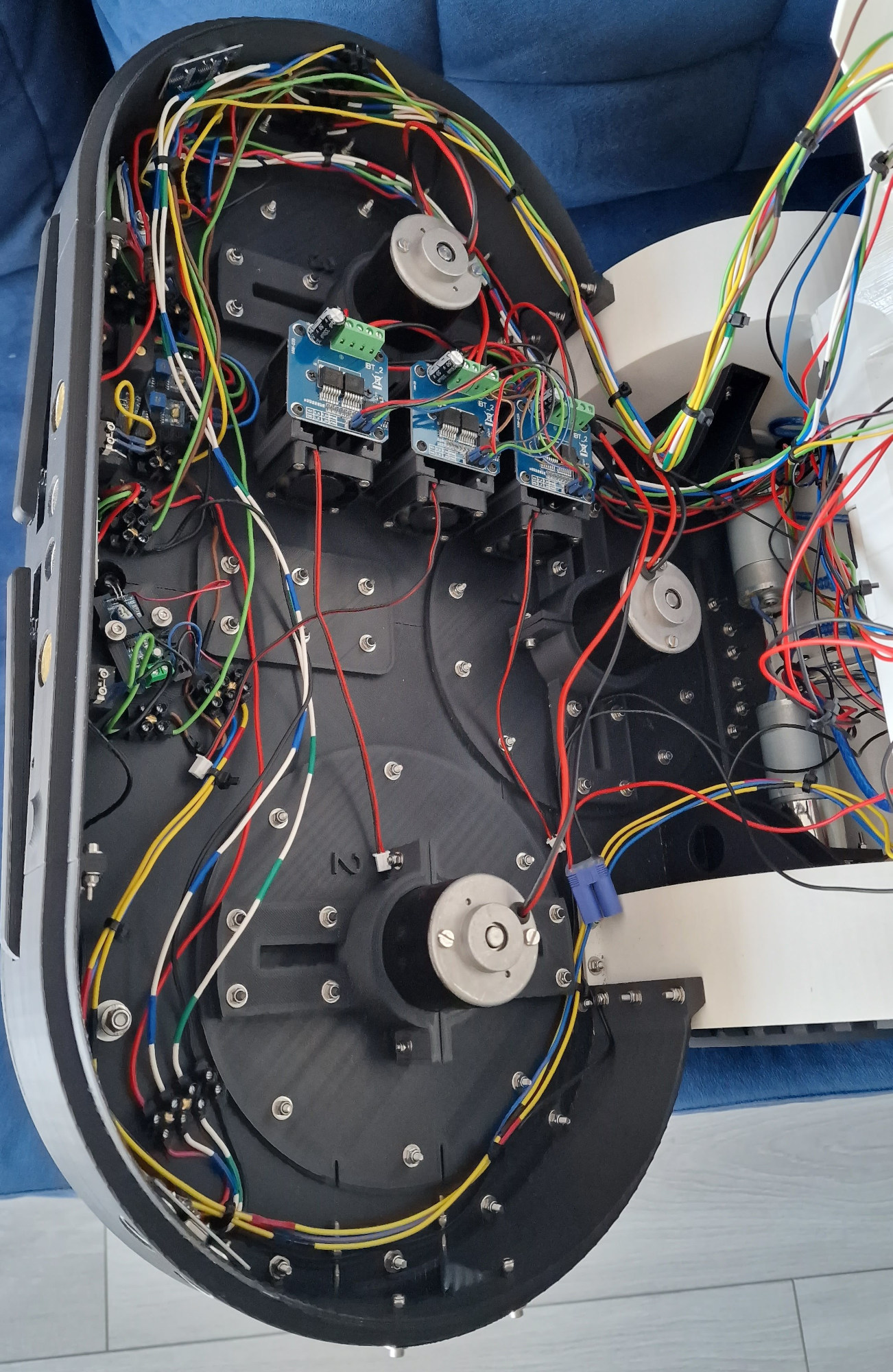
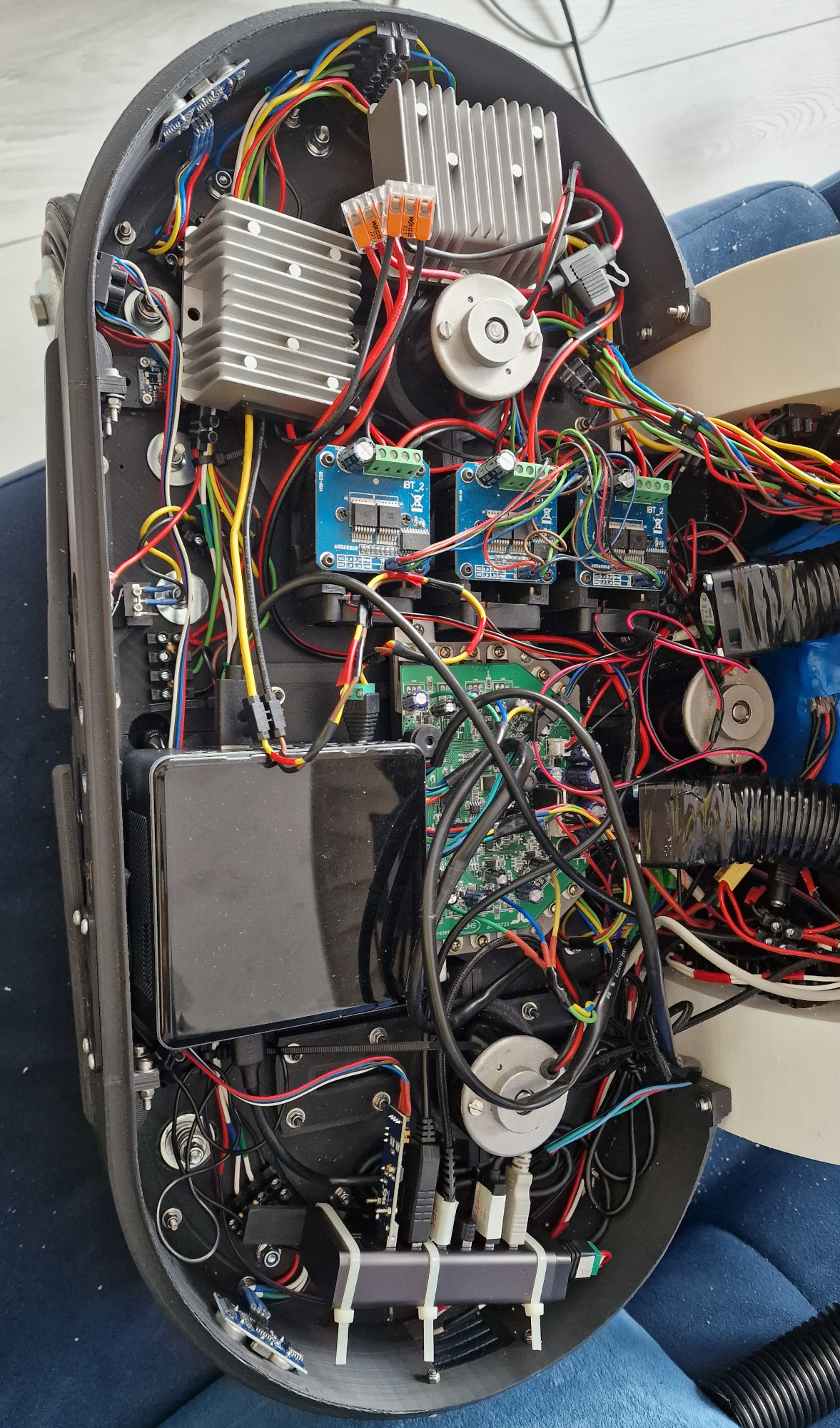
This is no longer just a modified kit—it’s a custom-built, wire-free, ROS2-powered mower. And that’s a story for another post.
Ever had a DIY project spiral into something bigger? Share your experiences below!


Be the first to comment